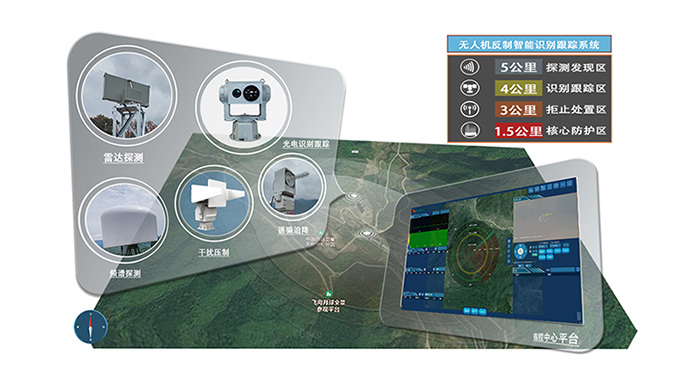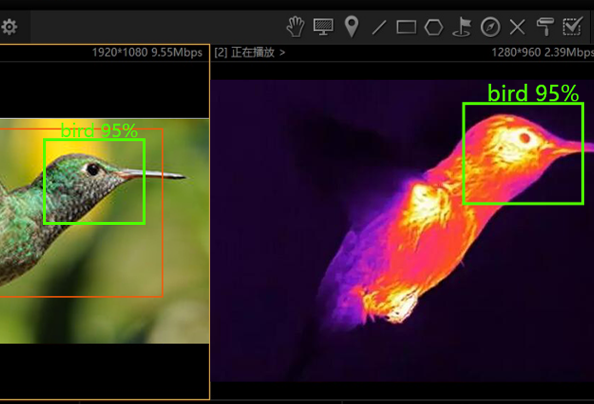

本系统是由一台可见光探测器加一台驱鸟激光器整合在同一云台上,保持了驱鸟激光光斑一直处于可见光图像中心位置,同时在前端灌入自主研发算法,以识别图像中鸟类、人与车辆种类。通过识别算法来旋转云台以保证被驱离鸟处于图像中心以满足驱鸟激光驱鸟需要,以及决定控制驱鸟激光器的开启与否,从而解决光伏存在的鸟害问题。

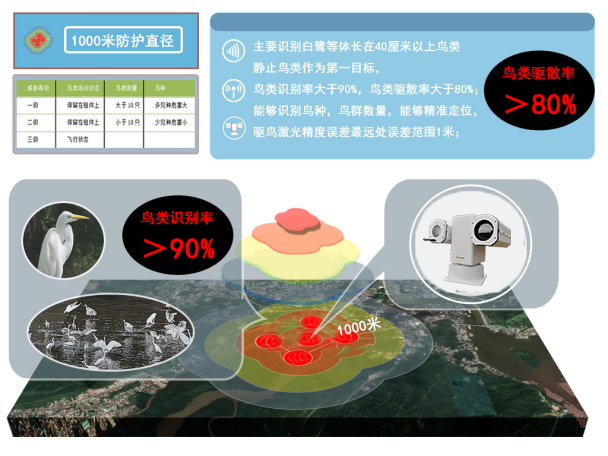
威胁等级 | 鸟类活动状态 | 鸟群数量 | 鸟种 |
一级 | 停留在组件上 | 大于10只 | 多见种危害大 |
二级 | 停留在组件上 | 小于10只 | 少见种危害小 |
三级 | 飞行状态 |
|
|

咨询热线:
400-110-5151
地址:深圳市龙岗区南湾街道立信路49号鑫丽华信息产业园信息产业园A栋403室